SIMbyom, byom_sim_yuwang.m, Yu-Wang attractor
- Author: Tjalling Jager
- Date: November 2021
- Web support: http://www.debtox.info/byom.html
- Back to index walkthrough_simbyom.html
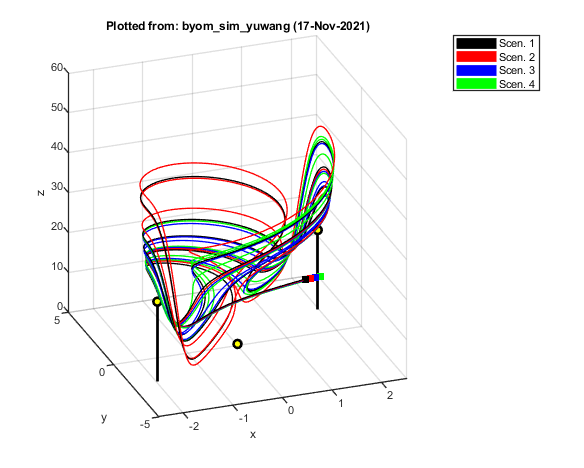
This is the Yu-Wang attractor (with exp instead of sinh or cosh). Default parameter set leads to a chaotic solution.
Model system:
Copyright (c) 2012-2021, Tjalling Jager, all rights reserved. This source code is licensed under the MIT-style license found in the LICENSE.txt file in the root directory of BYOM.
Contents
Initial things
Make sure that this script is in a directory somewhere below the BYOM folder.
clear, clear global % clear the workspace and globals global glo X0mat % allow for global parameters in structure glo diary off % turn of the diary function (if it is accidentaly on) % set(0,'DefaultFigureWindowStyle','docked'); % collect all figure into one window with tab controls set(0,'DefaultFigureWindowStyle','normal'); % separate figure windows pathdefine % set path to the BYOM/engine directory glo.basenm = mfilename; % remember the filename for THIS file for the plots
Initial values for the state variables
Initial states, scenarios in columns, states in rows. First row are the 'names' of all scenarios.
% Initial states, here slightly different starting values for state 1
X0mat(1,:) = [1 2 3 4];
X0mat(2,:) = [1 1.1 1.2 1.3];
X0mat(3,:) = -2;
X0mat(4,:) = 20;
Values for the model parameters
Model parameters are part of a 'structure' for easy reference.
% syntax: par.name = value
par.alp = 10;
par.bet = 40;
par.gam = 2;
par.del = 2.5;
Time vector and labels for plots
Specify what to plot. If time vector glo.t is not specified, a default is used, based on the data set
glo.t = linspace(0,5,5000); % time vector for the model curves % specify the y-axis labels for each state variable glo.ylab{1} = 'x'; glo.ylab{2} = 'y'; glo.ylab{3} = 'z'; % specify the x-axis label (same for all states) glo.xlab = 'time'; glo.leglab1 = 'Scen. '; % legend label before the 'scenario' number glo.leglab2 = ''; % legend label after the 'scenario' number
Optional settings for the simulations
opt_sim.plot_int = 25; % interval for plotting (how many time points to do in one go), default: 10 opt_sim.axrange = [-2.5 2.5; -5 5; 0 60]; % axis ranges for states, default: autoscale opt_sim.plottype = 1; % default: 4 % 1) 3d plot % 2) 2d plot % 3) states in subplots % 4) scenarios in subplots % 5) dx/dt versus x % 6) 2d plot for each scenario separate % 7) 3d plot for each scenario separate % which states to plot on which axes? For 2d and 3d plots. Default: x=1, y=2, z=3 opt_sim.stxyz = [1 2 3]; % state number for x-, y- and z-axis % equilibrium points (optional; comment out if not known) opt_sim.Xeq(1,:) = [sqrt(log(par.del*par.bet/par.gam)) sqrt(log(par.del*par.bet/par.gam)) par.bet/par.gam]; opt_sim.Xeq(2,:) = [-sqrt(log(par.del*par.bet/par.gam)) -sqrt(log(par.del*par.bet/par.gam)) par.bet/par.gam]; opt_sim.Xeq(3,:) = [0 0 1/par.del]; % X0mat = [1 2 3; Xeq'+0.001]; % start close to the equilibria
Calculations and plotting
Here, the script is called that will do the calculation and the plotting. The yellow points in the graph indicate the equilibrium points, and the squares the starting points. In the top of the file sim_and_plot.m, there are several more options to modify the plotting.
sim_and_plot(par,opt_sim); % call the script which calculates and plots